


- 제품소개
- AGV(무인반송차)
AGV(무인반송차)
다양한 산업현장에서
제공품 이송/완제품 이송/검사공정등에서
물류이송에 사용되는 자동화 장비(무인반송차)입니다.
- - 다양한 적재방식(컨베이어,다축로봇,지게차포크타입,부상식,견인식)
- - 다양한 위치인식방식(광유도, 자기유도, SPOT,레이저유도, 카메라유도, SLAM)
- - 다양한 제어장치 (산업용컴퓨터,PLC,FIRMWARE)
- - 사용하기 편리한 소프트웨어(차량제어시스템,원격차량통제시스템,멀티 모니터링 및 작업통계 시스템)
- - 다양한 운영지원 소프트웨어(3D 동작 시뮬레이터,이적재 로직편집기, 이동경로편집기, 물동량 시물레이터)

차상제어시스템(N² vCommander)
- 용도
- - 차량내부에 탑재되는 프로그램으로서 차량제어용 프로그램
- - RCS(상위)로부터 이동명령을 전달받은 후 이동경로 및 현재위치를 파악하면서 목적지까지 차량을 이동시킴
- - 각종 입출력신호를 제어하며, 차량제어에 대한 모든 것을 전담하는 프로그램
- - 차량에 탑재된 이적재장치와 인터페이스 혹은 직접제어를 수행
- 기능
- - 파라미터설정 : 차량의 속도, 수동조작기 속도, Creep Distance, Creep Speed 설정
- - 반자동 기동 : RCS와 온라인이 불가할 경우 직접 오더를 생성하여 작업하는 기능
- - 차량모니터링 : 차량의 현재위치와 운행 상태를 표시
- - 이적재 학습기능 : 서보모터의 경우 이동할 적절한 거리데이터를 미리 설정하는 기능
- 특징
- - 다양한 형태의 무인반송차에 적용가능한 플렉시블한 제어시스템
- - 이적재로직을 스크립트방식으로 직접 수정이 가능함(일부 주행로직도 가능)
- - 3D 동작 시뮬레이션 기능제공
- - SD, QUAD, DD 휠 타입 지원 및 부착위치 설정가능
- - 자동으로 경로에 진입 가능한 기능

일반적으로 무인반송차(Automated Guided Vehicle, AGV)는 사용목적, 운용되는 작업환경 등에 따라 내부를 구성하는 하드웨어 장치, 주행 특성, 이적재 방식 등이 서로 달라 그 종류가 다양합니다.
vCommander는 여러 가지 서로 다른 무인반송차에 관하여 주행과 이적재 동작을 일관성있는 제어해주는 유연하면서도 강력한 무인반송차 제어 소프트웨어로서, 무인반송차 내에 위치한 컴퓨터 기반의 제어기에서 실행됩니다.
vPlanner는 vCommander에 네트워크 통신을 통해 접속하여, vCommander의 내부 정보, 동작특성 등을 조회, 설정, 변경할 수 있는 무인반송차 관리 소프트웨어로서, 일반적인 데스크탑 컴퓨터 등에서 실행됩니다.
vCommander와 vPlanner의 유기적인 협업을 통하여 사용자의 요구사항에 따라 무인반송차가 능동적으로 진화하는 사용자정의 차량제어시스템을 구축할 수 있습니다.
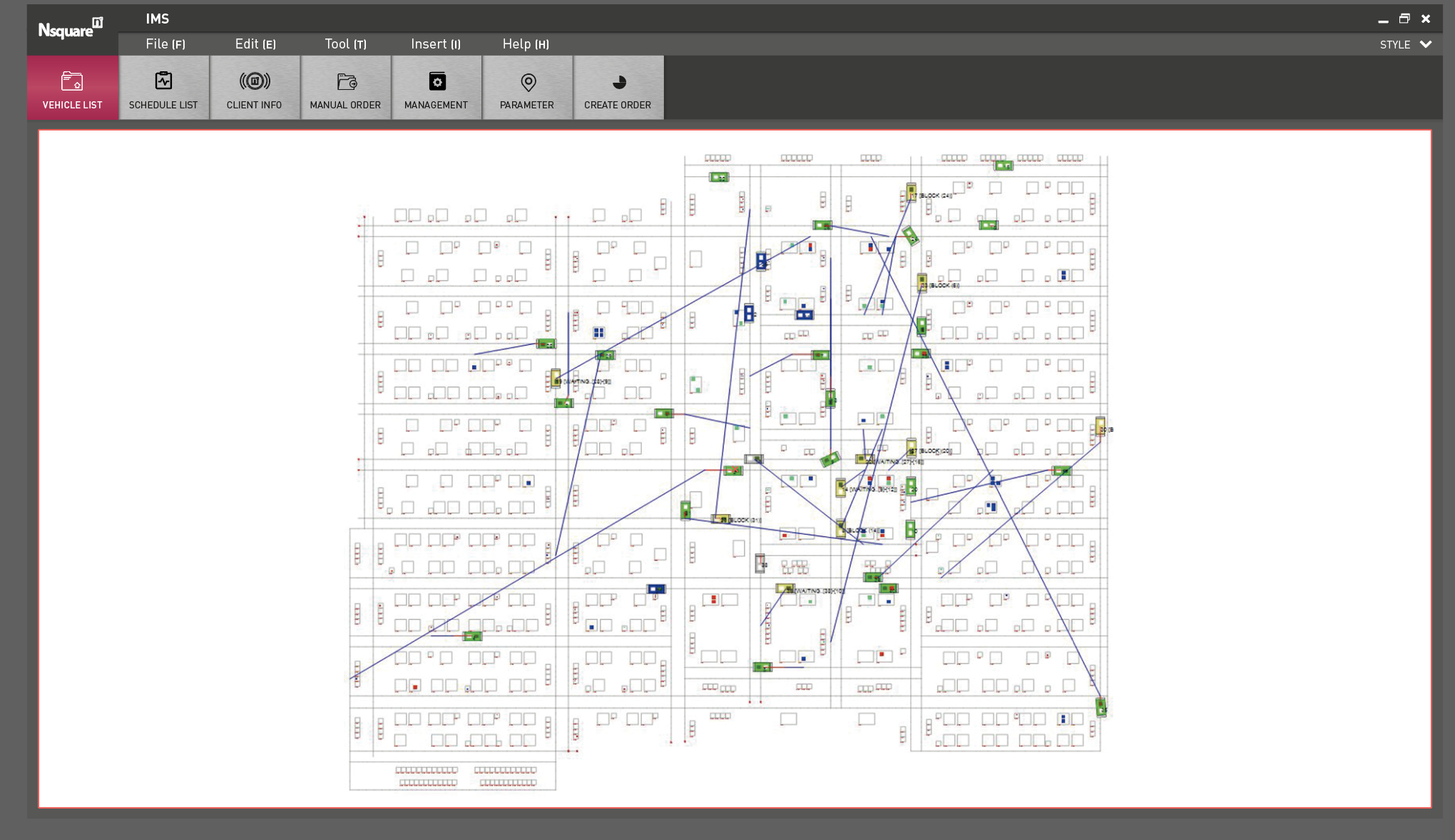
통합운영시스템(N² RCS : Remote Control System)
- 용도
- - 단위 그룹 내 모든 AGV들을 관리하며, HOST나 기타장치로 부터 오더를 수신 및 생성
- - 수행에 적합한 차량을 선택하여 작업지령을 전송
- - 각종 입출력신호를 제어하며, 차량제어에 대한 모든 것을 전담하는 프로그램
- - 차량에 탑재된 이적재장치와 인터페이스 혹은 직접제어를 수행
- 기능
- - 차량상태조회 : 각 AGV의 작업상태, 에러상태 설비상태들을 조회하는 기능
- - 이력조회 : 작업이력,에러이력을 조회하는 기능
- - 오더관리 : 진행중인 오더들의 상태 모니터링 및 조정기능
- - 설정 : AGV수량관리,각종 파라미터 관리
- 특징
- - 주어진 공간 내 다수의 무인반송차량을 충돌 없이 최단경로로 효율적으로 운영하는 시스템
- - 작업할당, 최단경로검색, 충돌예측 및 회피, 무인반송차 모니터링 기능
- - 다양한 튜닝기능(작업그룹, 경로조정 등)
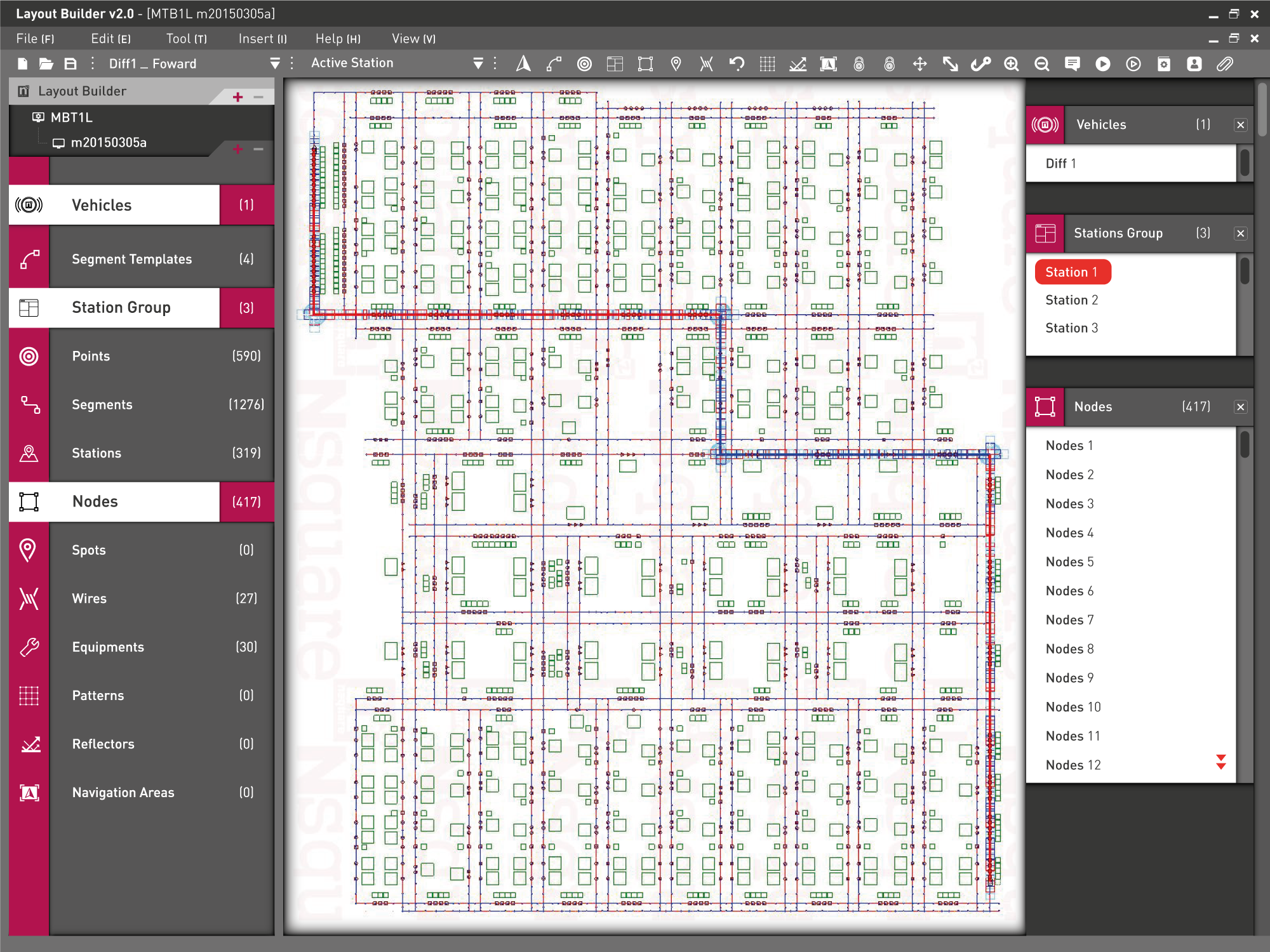
경로편집기(N² Layout Builder)
- 용도
- - AGV의 이동 경로를 편집할수 있는 도구
- - 수행에 적합한 차량을 선택하여 작업지령을 전송
- - 작성결과 데이타는 RCS, MCP에 적용되며 차량은 이 정보를 실제위치와 확인하며 목적지로 이동
- - 편집과정에서 블러킹 정보를 확인할 수 있으며, 경로속성(주행방식, 속도, 거리 등)을 설정 가능
- 기능
- - 경로편집 : AGV가 이동할 경로를 직접 도구를 활용하여 Drawing
- - Entities 속성 : 거리, 속도, 주행방법, 블러킹, 진입진출각도 등의 속성을 정의
- - 확대/축소 : 레이아웃의 확대 및 축소기능
- - EXPORT : 경로정보를 MCP에 적용
- 특징
- - 무인반송차의 주행경로를 컴퓨터에서 실제 건물도면을 토대로 편집할 수 있음(캐드파일)
- - 또한 동작시 블로킹영역을 자동계산해 줌
- - 여기서 작성된 파일은 차량제어시스템과 통합운영시스템에서 적용됨
- - 현장 레이아웃이 변경될 경우 신속하게 적용이 가능함
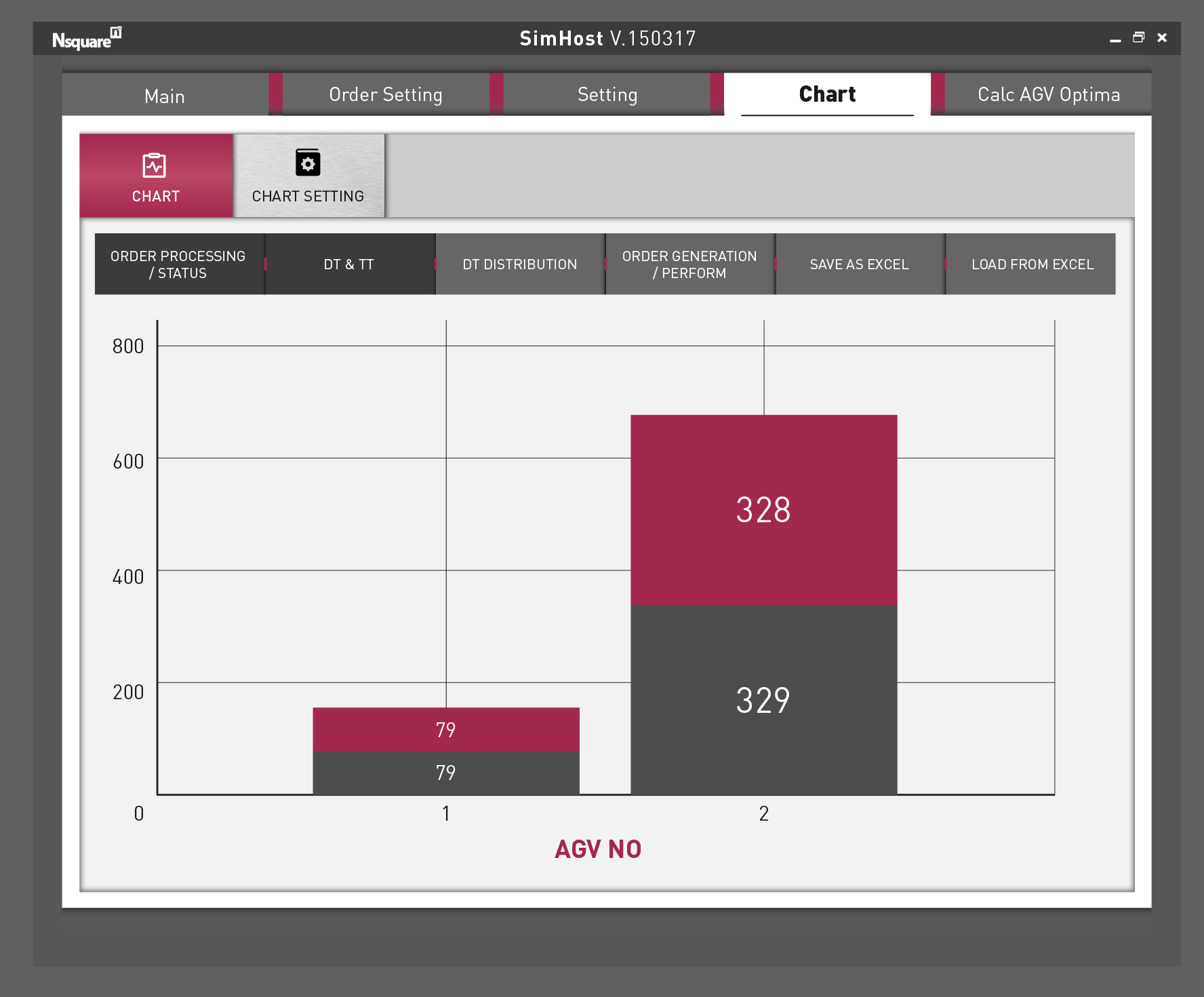
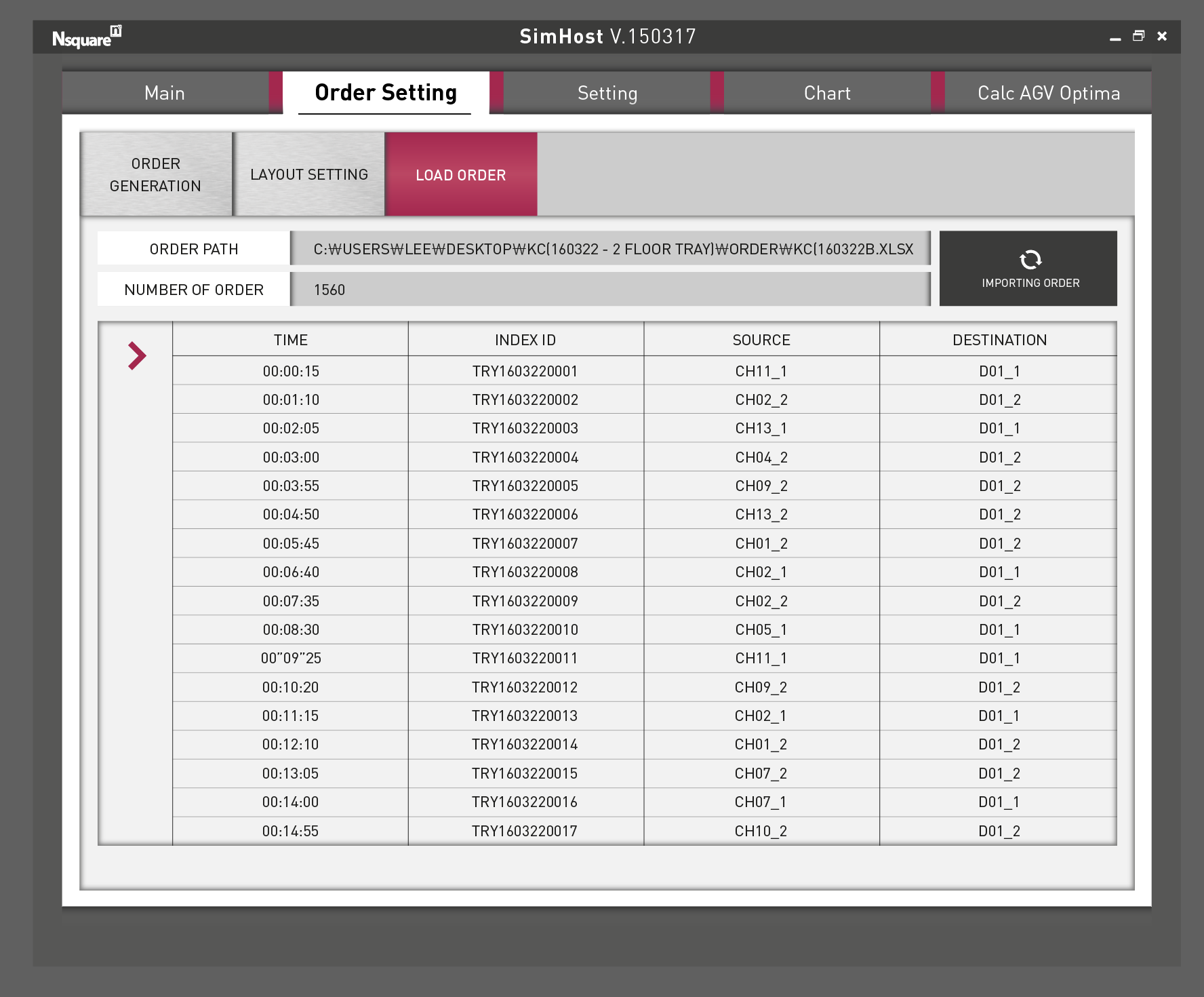
시뮬레이터(N² Simulator)
- 기능
- - 적용될 AGV수량 설정
- - 오더 발생을 위한 SIM-HOST설정
- - 확대/축소 : 레이아웃의 확대 및 축소기능
- - EXPORT : 경로정보를 MCP에 적용
- 특징
- - 요구되는 물동량을 처리가능한지 검증하기 위한 시뮬레이션용 프로그램
- - SIM-AGV, RCS, SIM-HOST로 구성되어지며 무인반송차량의 수량을 설정 가능
- - 작업오더의 발생주기와 횟수 등을 설정 가능
- - 다양한 분석정보를 표 및 그래프로 제공







회사주소 : 충남 천안시 직산읍 4산단5길 11-3 TEL : 041-587-0300 FAX : 041-587-0301
Copyright 2015. (주)엔스퀘어 All rights reserved.